In Japan heeft een groep onderzoekers aan Japans Chiba Institute of Technology een nieuw soort robot drone gepresenteerd. Het speciale aan deze robot is dat het sterk genoeg is om gegooid te worden, eenmaal tot stilstand gekomen klappen de poten uit en loopt de robot de rest van de weg naar zijn bestemming.
Het team heeft de robot, genaamd QRosSS ll, recentelijk gepresenteerd bij de IEEE/RSJ International Conference on Intelligent Robots and Systems 2015 in Hamburg. Dit is één van de grote bijeenkomsten voor robotica bouwkundigen. Tijdens de bijeenkomst toonden het team een robot die in staat is om zowel te rollen als te lopen en dit is normaliter vrij lastig te doen voor een robot die in contact staat met de grond. In het onderstaande filmpje wordt zowel de verouderde als de huidige versie getoond.
Ter inspiratie heeft het team gekeken naar een aantal andere robots, zoals bijvoorbeeld Droideka uit Star Wars:
En deze awesome robot, genaamd MorpHeX:
QRoSS ll
Het grote voordeel van QRoSS, vergeleken bij andere robots, is dat hij een loop systeem hanteert dat geheel los staat van de buitenste bescherming die nodig is om te rollen zonder te beschadigen. Mocht deze robot bijvoorbeeld gebruikt gaan worden in rampgebieden, dan zou de robot gemakkelijk in een gevarenzone gegooid kunnen worden om de boel te verkennen. Als de robot ergens vanaf valt worden de poten automatisch weer ingeklapt waardoor het weer veranderd in een bal.
Voordat de robot in zo’n situatie vertrouwd gebruikt kan worden zal hij nog wel iets handiger en sneller moeten worden met het gebruik van zijn benen. Lopend haalt de robot namelijk maar een snelheid van slechts 0,16 kilometer per uur terwijl het rollend al bijna 1 kilometer per uur haalt.
Specificaties
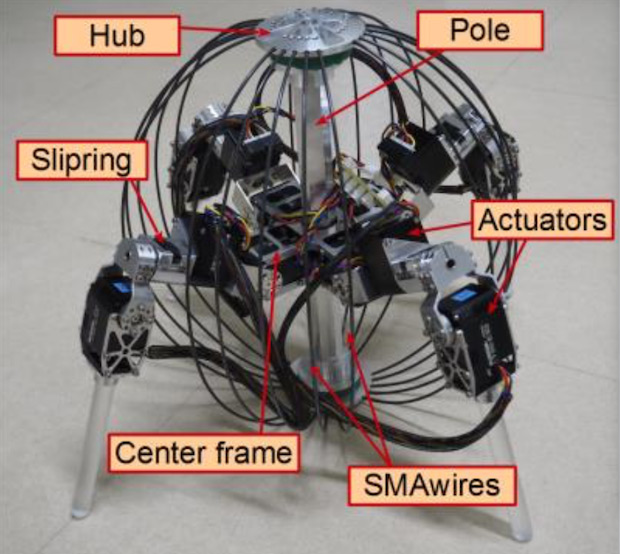
De nieuwe versie van de QRoSS heeft een diameter van 30 centimeter en weegt bijna 2,5 kilo. Dit kan enige problemen opleveren met het ver gooien van de robot, maar daar zal nog aan gesleuteld worden. Zoals de robot in elkaar is gezet lijkt het erop of het wel in zijn geheel verkleind moet kunnen worden.